Johnny and Mary, living in sunny south-east Asia, are assigned the following question by their Canadian-born teacher:
An ice-boat is sailing over a frozen lake with a velocity of 6 metres per second, due East. The captain of the ice-boat perceives the wind to be blowing from the South-West, although the wind is actually blowing from a different direction at a constant 11 metres per second. Use your knowledge of vectors and relative velocity to find the actual wind direction.

Mary decides to tackle the problem algebraically, while Johnny decides to model it using Geogebra.
Mary’s reasoning
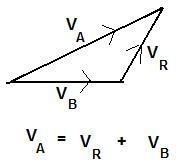
Mary knows the apparent or relative wind velocity, VR, is the actual wind velocity, VA, minus the velocity of the iceboat, VR = VA - VB.
Therefore the actual wind velocity is VA = VR + VB. She knows VB. She could easily calculate the direction of VA if she knew the magnitude of VR. As she is missing this apparently vital information she begins a seemingly idle sketch.
Therefore the actual wind velocity is VA = VR + VB. She knows VB. She could easily calculate the direction of VA if she knew the magnitude of VR. As she is missing this apparently vital information she begins a seemingly idle sketch.
Recalling the triangle law of vector addition, Mary starts to sketch.
She labels the known facts.
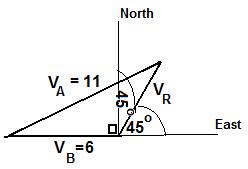
Mary’s final sketch prompts her to recall the sine law.
 |
sine 135°/11 = sine y°/6
sine y° = (6/11) × sine 135° = 0.3856 …
y = sin-1 (.3856 …) = 22.69° (to two decimal places)
x = 180° – 135° – 22.69° = 22.31° (to two decimal places)
z = 90° - 22.31° = 67.69°
The bearing of the wind is from 180° + 67.69° = 247.7° (to one decimal place)
Johnny’s Reasoning
No. | Geogebra | Reasoning |
1 | O = (0, 0) | Origin |
2 | P = (11, 0) | Needed to define a circle |
3 | Circle[O, P] | The actual wind speed is 11 km/h, with an unknown direction. The tip of the velocity vector is somewhere on a circle of radius 11. |
4 | i = (1, 0) | Unit vector, East |
5 | j = (0, 1) | Unit vector, North |
6 | Number k is created from the slider pull-down menu | A slider to change the magnitude of the relative wind velocity |
7 | u = k i + k j | Wind from the south west is going north east. The direction is somewhat special; consequently the vector components are equal. Status: a hidden vector in quadrant I. |
8 | Q = O + -u | A hidden point; the tail of the relative wind velocity. |
9 | relwα = Vector[Q, O] | Shows the wind in quadrant III, from the south west. |
10 | iceboat = 6 i | The actual velocity of the iceboat |
11 | A = (6, 0) | The tip of the iceboat velocity vector. |
relwβ = A + relwα | A translation (or copy) of the relative wind vector is created and added to the iceboat velocity vector. | |
12 | R = A + u | The point at the tip of the iceboat velocity vector. |
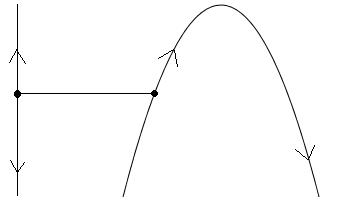
13 | actualw = Vector[O, R] | Move point k on the slider until the actual wind velocity has a magnitude of 11 (i.e., just touching the circle). |
14 | α = Angle[P,A,R] | |
15 | β= Angle[R,O,A] |
insert Geogebra file
Moving the slider creates directly proportional changes in the magnitude of the relative wind velocity, which in turn affects the actual wind velocity. The slider can be adjusted so that the actual wind velocity touches the circle representing its magnitude. A careful comparison reveals Johnny and Mary have reached the same result by different methods.